
行为测定快速复盘系统 (Viso)

行为观察记录分析系统 (The Observer XT)



当虚拟逐渐接入现实,你是否想过足不出户便能习得专业技能?
对于工程学领域的学习者来说,这种可能正在悄然进行……
在工程学领域,除了理论知识学习,实践经验也非常重要。学习者必须从实践经验中学习,以补充理论基础。因此,常常需要使用最先进的设备,如协作机器人(CoBots),它的特点是与人一起工作,并且更便宜、体积更小,可以轻松安排于各种流程中。
然而,教育机构的资源往往有限。近年来,在学习型工厂的背景下,各式各样的虚拟现实(VR)的学习环境被开发并应用于工程教育中。通过数字教学方法弥补有限资源与全面学生教育之间的差距或许成了目前的破题关键。
那么,新手工程师是否能借助VR的实践培训,获得良好的学习成效呢?
来自Heinz Nixdorf研究所的Gräßler教授和他的研究团队对此进行了探究(Gräßler et al.,2023)。
虚拟现实(VR)是一种沉浸式技术,可以为工程教育和培训创建虚拟的学习环境。
这些学习环境的优点包括:
在工程学中使用虚拟学习环境的目的是创造一种受控且安全的环境,让学习者都可以在近乎真实的环境中模拟使用复杂和昂贵的工业设备,体验工业设备的功能和触觉,实现体验协作与沉浸式学习,以在现实情况下实践理论知识。
为了探究工程学新生在虚拟学习环境下的学习成效和认知负荷,研究者提出以下假设:
在相同的自学教学方法下,虚拟学习环境是否能获得与传统学习环境相同的学习成效?
研究团队建立了一个基于游戏的协作、沉浸式虚拟学习环境,其中包括一个集成式VR工具,可以让学生熟悉协作机器人(CoBots)的动作和基本功能。
为了验证研究假设,研究团队将虚拟学习环境与传统学习环境在主观和客观学习成效方面进行了比较。
两种环境均配备观察摄像机,捕捉学生的行为。使用 Noldus 的行为测定快速复盘系统(Viso)系统回放记录的观察结果,并使用行为观察记录分析系统(The Observer XT)分析数据。通过使用行为工具配合测评问卷,可以更好地观察并分析行为。
共10名计算机学院学生参与实验,均须完成一项训练任务:协作CoBot进行拾放任务的编程(图1) 。
CoBot在位置 A 拾取给定物体,学生引导其越过障碍物,并物体存放在位置 B。
为此,必须完成以下六个步骤:
依据研究假设,为了比较自动化实验室中的传统学习环境与虚拟学习环境,被试被分为实验组&对照组(图2):
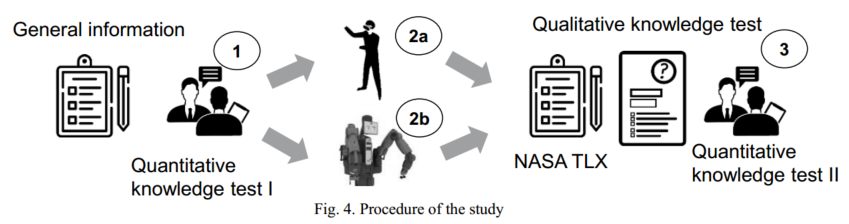
研究进行前后测,即在训练任务前后对被试学习水平进行主观和客观的量表测评与精神压力测试(图3)。
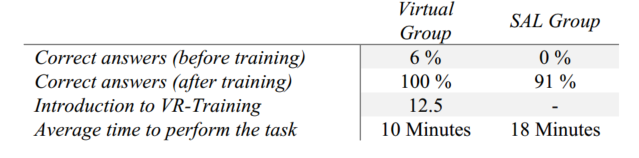
学习成效结果显示(表1),两组被试的学习成效相似,都非常高,超过了90%。被试在培训前对如何使用CoBots一无所知,但在培训中均能够良好掌握相关内容。
训练时间的结果显示,两组被试的训练时间有所不同(表2):VR组平均 10 分钟,训练时间较短,而传统组平均 18 分钟。
这表明使用VR学习环境可以节省学习操作CoBot的时间,且不会对学习成效产生负面影响,即通过使用虚拟现实学习环境,新手能够在较低的认知负荷下取得与传统教学环境相似的学习成效,且教学时间可以大大减少。
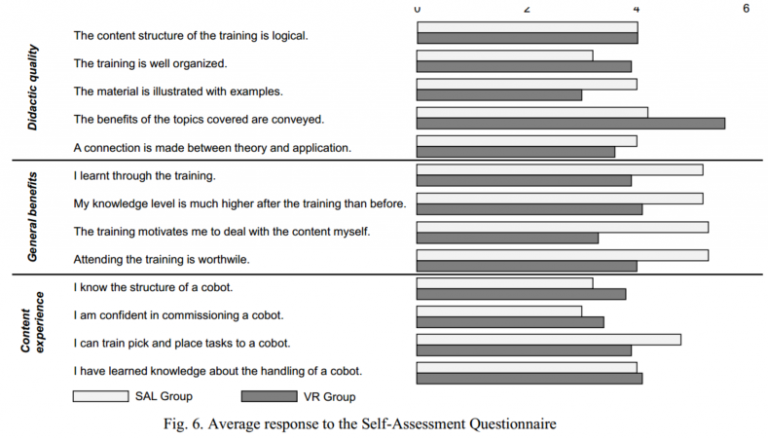
精神压力测试的结果显示,两组之间存在差异。VR组各方面需求的平均得分均低于SAL组。
初步研究结果表明,虚拟学习环境是传统实验室环境的理想替代。
研究者以此得出结论:虚拟现实或许可以帮助学生通过实践经验学习,以解决教学资源有限的问题,弥补大学稀缺资源之间的差距。
在未来的研究中,探索特定大学课程的虚拟学习环境将是有益的。此外,探索如何在不同的学习环境中使用虚拟学习环境,如操作机器来创建和开发未来产品,似乎具有巨大的潜力。
Gräßler, I.; Hieb, M.; Roesmann, D.; Unverzagt, M. & Pottebaum, J. (2023). Virtual learning environment for teaching the handling of collaborative robots. 13th Conference on Learning Factories.





